
电动葫芦是一种小型的起重机械,其作用是帮助人们升降、移动、装卸重物等,以减轻劳动强度和提高劳动效率。它由电动机、减速装置、制动装置、运行机构、卷筒或链轮、吊具及电气控制等部分组成。
研制历程
编辑1911年德国的德马格(DEMAG)公司设计研发了世界上X个钢丝绳电动葫芦,正式拉开电动葫芦发展的序幕;1925年德国德马格公司推出第二代N型钢丝绳电动葫芦,相较于X代钢丝绳电动葫芦,N型钢丝绳电动葫芦在外观设计、产品性能,技术水平等方面实现新突破;1927年德国德马格公司生产了第三代“K型钢丝绳电动葫芦”,K型钢丝绳电动葫芦是世界X以锥形制动电动机为动力源的电动葫芦,电动葫芦在起重量、起重高度等层面实现质的飞跃,是电动葫芦发展史上的一个重要里程碑;1959年德国德马格公司研发设计的第四代P型钢丝绳电动葫芦与前三代电动葫芦相比,P型钢丝绳电动葫芦为全球X款双速电动葫芦,有常速与慢速两种起升速度,可以满足精密装卸、机床检修等精细作业的需求。
国产电动葫芦是从20世纪50时代以仿制方式开始生产发展的,1949年7月上海通用机器厂最先试制成功仿德国德马格公司K型1.5t和3t一般用途钢丝绳电动葫芦,并投入小批量生产,1953年天津起重设备厂仿原苏联40年代TB型葫芦试制了1t和2t一般用途钢丝绳电动葫芦,定型为TV型电动葫芦。1954年又试制了3t和5t葫芦,1957年完成了0.25t~5t系列产品的修改设计与生产,TV型电动葫芦是中国X代电葫芦。1963年天津起重设备厂设计生产了防爆型电动葫芦,1964年由天津起重设备厂、上海起重设备厂、重庆起重机厂、定西起重机厂、西安起重机厂、沈阳起重机厂和北京起重运输机械研究所联合设计、试制并开始生产CD、MD型系列葫芦,CD、MD型葫芦为中国第二代电动葫芦;国产CD1/MD1电动葫芦串联结构的改进是在1975年,主要配置有:锥形电机、直齿调质齿轮、铸铁卷筒、铸造外壳、锥形盘式制动器、上挂运行小车;国产HC、QH、ZH型串联结构的改进是在1990年,配置和1975年的是一样的;国产AS型电动葫芦引进串联结构是在1983年,配置有:锥形电机、直齿调质齿轮、铸铁卷筒、焊接框架外壳、锥形盘式制动器、上挂或侧挂运行小车。从20世纪70年代末到80年代初,葫芦式起重机已进入到一个引进开发的新阶段。天津起重设备厂引进了德国STAHL公司的AS型全系列钢丝绳电动葫芦技术;南京厂、北京起重设备厂和山海关起重设备厂三家联合引进了德国DEMAG公司的环链葫芦技术;进入80年代中期,以南京起重机械厂为主联合设计开发了H型钢丝绳电动葫芦,重庆起重机厂为主联合设计开发了葫芦门式起重机系列产品,河北奔腾起重厂引进的AS型葫芦技术具有80年代世界先进水平,到2023年国内电动葫芦已发展为AS型电动葫芦为代表。
工作原理
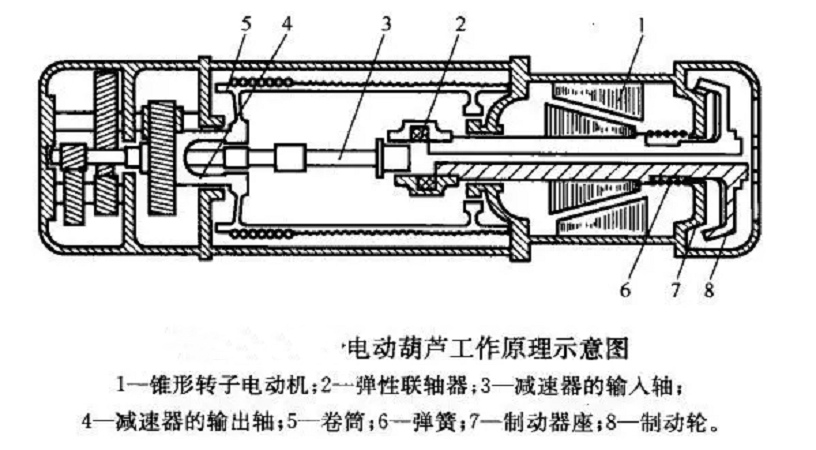
编辑电动葫芦工作的原理是电动机把动力经联轴器、减速装置传递给卷筒或链轮,让卷筒或链轮作旋转运动,卷筒或链轮又把动力传给钢丝绳或者链条,钢丝绳或者链条带动取物装置及重物作垂直升降和水平移动,再由电气控制部分控制电机的运行和停止,重物提升到所需高度及位置。具体机械部分、制动装置和电气控制部分的工作原理如下:
机械部分的工作原理
电动机的轴功率和扭矩先经联轴器传递到减速装置中,齿轮箱将电机的高速旋转转化为低速高扭矩的输出,通过齿轮的传动将动力传递到卷筒上。卷筒是一个圆柱形的装置上面缠绕着钢丝绳,当电机驱动齿轮箱转动时,卷筒也随之旋转,从而使钢丝绳缠绕在卷筒上。钢丝绳带动滑轮和吊钩将被起重物体升起。为防止重物下降,在起升机构上设置了一个电磁制动器。制动是依靠弹簧的压力把内、外盘压紧,原理与摩擦离合器相似,松开时利用电磁铁通电产生磁力吸住外盘使其与内盘分离。电磁制动器的电路与起升电机的电路并联,因此只要起升电机一启动,电磁制动器就松开,使重物能够X的上升或下降;当电动机关闭时,则电磁制动器也断电,电磁吸引力消失,内外盘在弹簧压力的作用下紧紧贴合住,起到制动的作用。

电动葫芦机械部分工作原理示意图
电气部分的原理
电源由断路器QS进入,升降电机M1由接触器KM1和kM2的主触点控制,左右移动电机M2由接触器KM3和kM4主触点控制,两台电机都需要正向和反向控制。
控制电路主要有4个点动按钮Sв1,Sв2,Sв3,Sв4和4个吸合线圈KM1,KM2,kM3,KM4及4个常闭自锁触点组成,完成对两台电机M1、M2的双向启停控制。
升降过程:断路器QS闭合,按下上升启动按钮Sв1,接触器KM1主触点闭合,电机M1正向运转,所吊物体上升,同时KM1常闭触点断开,实现与接触器KM2的互锁,此时下降按钮Sв2无效;,如需停止上升,松开Sв1,KM1线圈失电主触点断开,串联到下降回路的常闭互锁触点KM1复位;按下下降按钮Sв2,接触器KM2的线圈得电,主触点闭合,电机M1反向启动,所吊物体下降,同时KM2常闭互锁触点断开,上升回路被切断,上升按钮Sв1无效。如需停止下降,松开按钮Sв2,KM2线圈失电主触点断开,同时上升回路中KM2常闭互锁触点复位。
水平移动过程:电葫芦的水平移动控制过程与升降控制相似,按下按钮Sв3时,接触器KM3的线圈得电,主触点闭合,电机M2正向转动,实现所吊物体向前移动,同时KM3常闭触点断开,向后移动的回路被切断;如需停止移动,松开按钮Sв3,KM3线圈失电主触点断开,常闭触点复位,电机M3停止工作;当按下Sв4时,接触器KM4的线圈得电主触点闭合,电机M2反向转动,所吊物体向后移动,同时KM4常闭触点断开,此时按下Sв3无效,实现与接触器KM3互锁。
保护部分:电葫芦的升降过程中设有限位开关YB,操作到一定极限位置时限位开关动作,切开主回路,保护设备不被损坏;并且设有机械刹车,电机主轴装有电磁抱闸,断电时在弹簧拉力下抱死电机主轴,为预防突然停电保持所吊物体不下落。
电动葫芦的电气原理图
制动装置的工作原理
电动葫芦在提升或下放重物时, 要保证重物能在任意高度上停留,以适应不同工作的需要。这样就要求提升电动机有一套准确可靠的制动装置。同时要保证通电时电动机能正常运转,断电时电动机始终处于良好的制动状态 (不让电动机因重物的牵拉而往下滑移)。因此不能采用一般的制动方法。制动装置也称抱闸装置或刹车装置,电动葫芦上所采用的制动方法,根据起重电动机类型的不同也不尽一样。下面介绍常见的锥形转子电动机制动原理:
锥形转子电动机(见下图)制动: 锥形转子电动机及其定子铁芯同为圆锥形结构,且具有相同的锥度,电动机转子转轴上装有压缩弹簧1(也称复位弹簧),依靠该弹簧的作用, 在电动机断电的情况下, 转子的前部即转轴输出端将被推出定子铁芯内腔一定的距离(转子铁芯与定子铁芯对不齐的位置)。此时装在风 扇制动轮8上的锥形制动环6、7(抱闸盘)和电动机的后端盖9紧密接触,电动机转子处于被制动状态。在正常情况下,因工作需要或因故障而断电时,此时电动机失电,虽然有重物的牵拉,但电动机在制动的作用下,其转轴始终保持在原位不动 (这只是一种理想效果,但实际上仍有很小的一段移动距离)。在通电的情况下,电动机的锥形转子将受到一种电磁拉力的作用,此时的弹簧1处于被压缩的状态,同时风扇制动轮和制动环一块脱离后端盖9,电动机正常运转。电动机通电时,锥形转子的外表会受到一种垂直表面的电磁力F的作用,根据矢量求合力的原理,电磁力F可分解为 F1和F2两个分力。对于整个转子来说处于同一圆周位置的两个对称点上的分力F1将会因大小相等、方向相反而相互抵消。起作用的唯有分力F2,这里的分力F2就是所称的磁拉力。在磁拉力F2的作用下,整个转子将产生轴向位移,弹簧1被压缩,制动盘松开,电动机正常运行。反之,当电动机断电时,电磁力F随即消失,磁拉力F2也不消失,在复位弹簧1的作用下,电动机重新被制动 (刹车)。锥形制动环由石棉树脂制成,它具有耐高温、抗磨及不易变形的特点。

锥形转子电动机的结构图
基本构造
编辑总述
电动葫芦主要由提升部分和运行部分(也叫运行小车)构成。其中提升部分的主要部件由:起重电动机、卷筒和卷筒外壳、变速箱 (减速装置)等组成,在电动机和变速箱之间起连接 (传动)作用的有X联轴器、中间轴和刚性联轴器 (也称花键套)等。电动葫芦的运行部分主要由:行走电动机、行走电动机变速箱 (变速装置)以及走轮 (包括主动走轮和被动走轮)和支架等部分组成。
提升部分传动
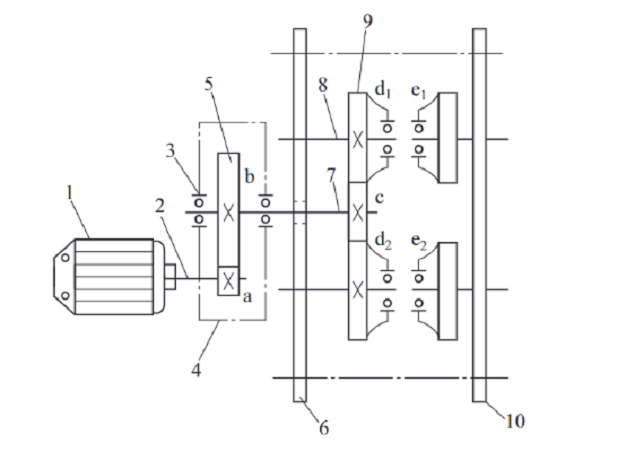
提升部分的传动过程(见下图)是:电动机输出轴(7)→X联轴器(8)→中间轴(9)→刚性联轴器10(花键套)→ 变速箱输入轴11 (X传动轴)→ 齿轮a齿轮b→齿轮c→齿轮d→齿轮e→齿轮f→空心轴13 (变 速 箱 输 出 轴 )→卷 筒3(空心轴与卷筒通过花键连在一起),;电动葫芦因此能提升或下放重物 。
电动葫芦提升部分的传动示意图
运行部分传动
运行部分的传动过程(见下图)是:运行电动机输出轴 (变速箱输入轴)→齿轮a→齿轮b→变速箱输出轴和齿轮c→带动动主轮d1和d2往同一方向旋转,并且被动轮e1和e2也跟着往相同方向运转)。这样电动葫芦就能将重物运移至所需要的高度位置。运行部分的前部还有一对单轮(被动轮)它主要起导向和支点的作用。
电动葫芦运行部分的传动示意图
基础组成部分
电动机:
为传动装置、缠绕装置或运行小车提供动力,通常采用交流电机或直流电机,其功率大小根据使用场合的需要而定。
联轴器:
在电动机和变速箱之间起连接 (传动)作用的有X联轴器、中间轴和刚性联轴器 (也称花键套)等。
传动装置:
通常是由减速器组成,将电动机的高速转动转换成低速高扭矩的运行,传递足够的扭矩来驱动绳轮或链轮运转。
制动器:
制动器是电动葫芦的关键部件之一,主要用于控制起重物的下降速度、停止位置及防止突然停电时起重物下落。
缠绕装置:
由卷筒或链轮组成,其作用是带动钢丝绳或环链等以间歇、循环的运行方式上升或着下降。
绳轮:
绳轮是电葫芦的主要起重部件,通过绳轮将起重物提升到指定高度及位置。
吊钩
吊钩用于悬挂和固定起重物。
控制器
也叫操作手柄,通过它可以控制电动机的启停和运行。

钢丝绳式电动葫芦结构图
主要分类
编辑电动葫芦按照缠绕装置的不同可分为:钢丝绳电动葫芦和环链电动葫芦两种。在钢丝绳电动葫芦和环链电动葫芦中按有无运行机构又可分为:固定式和运行式两种,固定式电动葫芦无运行机构,运行式电动葫芦有运行机构。
运行式钢丝绳电动葫芦

运行式环链电动葫芦
钢丝绳电动葫芦
固定式钢丝绳电动葫芦具体分为:支承式和悬挂式两种。其中支承式电动葫芦根据座脚位置的不同分为上方固定式、下方固定式、左方固定式、右方固定式。
运行式钢丝绳电动葫芦按运行机构型式分为:单梁小车式和双梁小车式电动葫芦两种。单梁小车式电动葫芦沿单梁轨道运行;双梁小车式电动葫芦沿双梁上的两条轨道运行。单梁小车式电动葫芦根据电动葫芦总体布置的结构型式,一般包括普通型和低净空型。2004版JB/T 9008.1-2004标准也称为标准建筑高度型和低建筑高度型两种。具体分类关系见表1。
表1 单轨小车式电动葫芦分类
|
单 轨 小 车 式 |
标准建筑高度 (根据运行轨道的形式和运行机构的驱动方式分为以下几种型式) |
直线型轨道 |
刚性连接的手拉小车式电动葫芦 |
|
刚性连接的链轮小车式电动葫芦 |
|||
|
刚性连接的电动小车式电动葫芦 |
|||
|
曲线型轨道 |
铰式连接的手拉小车式电动葫芦 |
||
|
铰式连接的链轮小车式电动葫芦 |
|||
|
铰式连接的电动小车式电动葫芦 |
|||
|
低建筑高度 (根据运行轨道的形式和运行机构的驱动方式分为以下几种型式) |
直线型轨道 |
刚性连接的手拉小车式电动葫芦 |
|
|
刚性连接的链轮小车式电动葫芦 |
|||
|
刚性连接的电动小车式电动葫芦 |
|||
|
曲线型轨道 |
铰式连接的手拉小车式电动葫芦 |
||
|
铰式连接的链轮小车式电动葫芦 |
|||
|
铰式连接的电动小车式电动葫芦 |
(资料来源:)
环链电动葫芦
环链电动葫芦分为固定式和运行式环链电动葫芦两种。按起重链条行数分为单链、双链、三链、四链、六链等不同额定载额的电动葫芦。

固定式环链电动葫芦
钢丝绳电动葫芦和环链电动葫芦本身就包括防爆电动葫芦,只是防爆电动葫芦被使用在特殊的环境中,需要单独分出来介绍。防爆电动葫芦分为爆炸性气体环境用防爆葫芦和可燃性粉尘环境用防爆葫芦。防爆葫芦的种类是根据其使用环境及电气外壳允许的最高表面温度进行分类和分组的。在爆炸性气体环境下,防爆葫芦的电气设备根据 GB 3836.1—2000 中第四部分的规定,分为Ⅰ类和 Ⅱ类。Ⅰ类为煤矿用防爆葫芦;Ⅱ类为除煤矿外的其他爆炸性气体环境用防爆葫芦。其中Ⅱ类隔爆型“d”和本质安全型“i”的防爆葫芦,又分为ⅡA、ⅡB 和ⅡC 级防爆葫芦。
在可燃性粉尘环境下,防爆葫芦的电气设备根据 GB 12476.1—2000 中第四部分的规定,分为 A 型和 B 型 。防爆葫芦分类后要根据其电气外壳允许的最高表面温度要求再进一步的分组。对于Ⅰ类防爆葫芦,当电气设备表面可能堆积煤尘时,其最高表面温度不应超过150℃为一组;当电气设备表面不会堆积或采取措施(例如密封防尘或通风)可以防止堆积煤尘时,其最高表面温度不应超过450℃为另一组;对于Ⅱ类和粉尘类防爆葫芦,按电气设备的最高表面温度要求可分为T1~T6组,具体内容见表2。
表2 温度组别
|
温 度 组 别 |
电气设备最高表面温度 ℃ |
|
|
爆炸性气体环境用电气设备 |
可燃性粉尘环境用电气设备 |
- |
|
T1 |
450 |
|
|
T2 |
300 |
|
|
T3 |
200 |
|
|
T4 |
135 |
|
|
T5 |
100 |
|
|
T6 |
85 |
|
(资料来源:)
性能指标
编辑环链电动葫芦
1、工作级别:电动葫芦起升机构的工作级别,根据GB/T3811的规定,按照载荷状态级别及名义载荷谱系数、使用等级及总使用时间,分为M1~M8共八个级别,见表3。
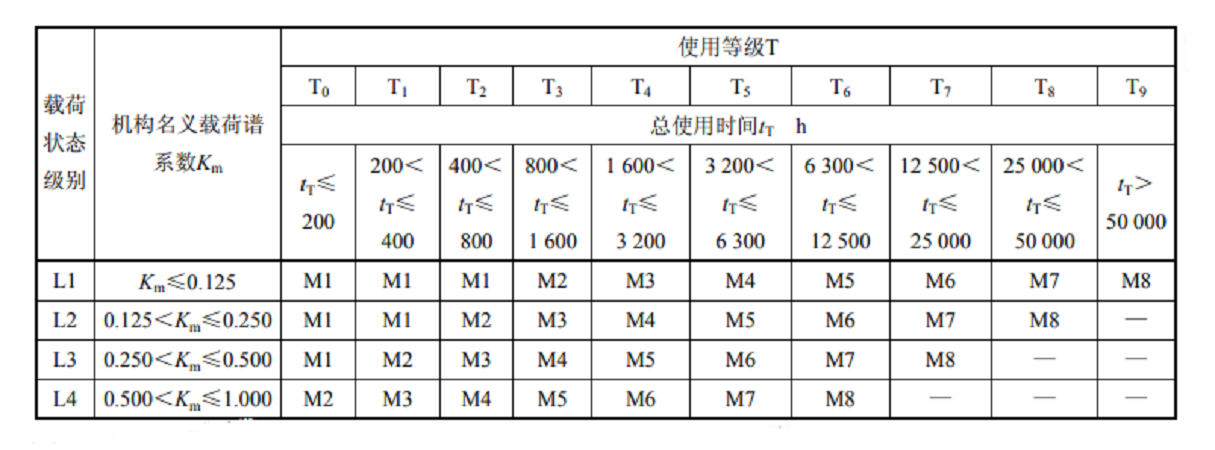
环链葫芦的工作级别表3
2、额定起重量
额定起重量是指电动葫芦在正常工作条件下允许起升的最大重量,也称为举重,用符号mQ表示,单位为千克(kg)或吨(t),起重能力是电动葫芦主要应用的技术参数。
3、起升高度
起升高度是指从电动葫芦运行轨道的上表面到取物装置下极限的位置,即吊具最高和最低工作位置之间的垂直距离,在电动葫芦的实际作业中,不得超过起升高度允许值。起升高度用符号H表示,单位为米(m)。
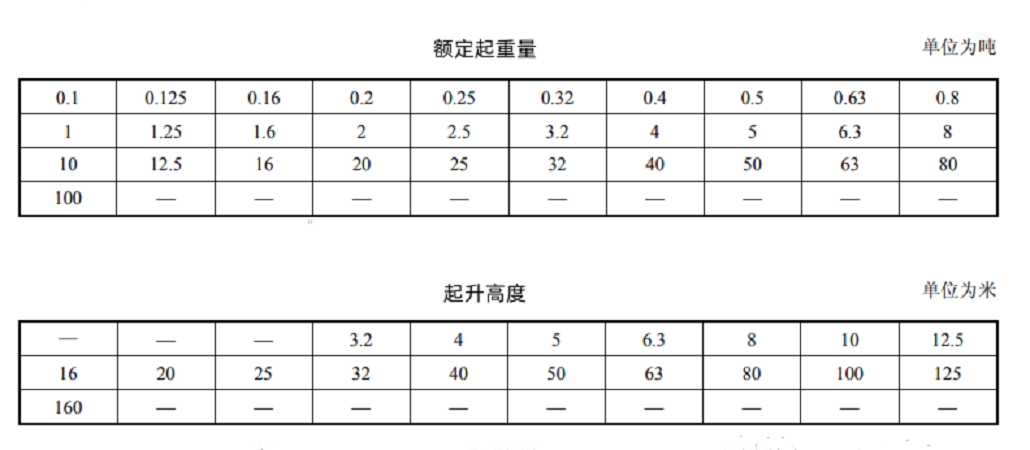
环链葫芦的额定起重量和起升高度表4
4、起升速度
电动葫芦在稳定运行中,起升额定载荷的垂直位移速度为起升速度,由符号Vm表示,单位为m / s,例如:通用桥式起重机上使用的电动葫芦的提升速度为0.1-0.4m / s。
5、运行速度
电动葫芦在水平轨道上稳定运行时的移动速度称为运行速度,用符号Vy表示,单位为m / s, 例如:普通桥式起重机上运行小车的行进速度为0.15-1m / s。
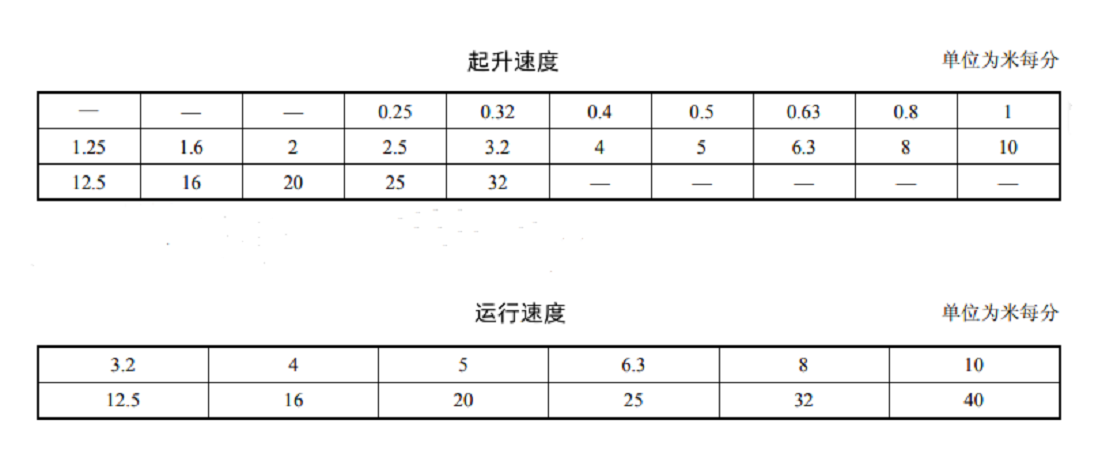
环链葫芦的起升速度及运行速度表5
钢丝绳电动葫芦
1、电动葫芦起升机构的工作级别,根据 GB/T 3811—2008 中 3.3.3 的规定,按照载荷状态级别、机 构载荷谱系数、使用等级及总使用时间,分为 M1~M8 共 8 个级别,见表6。
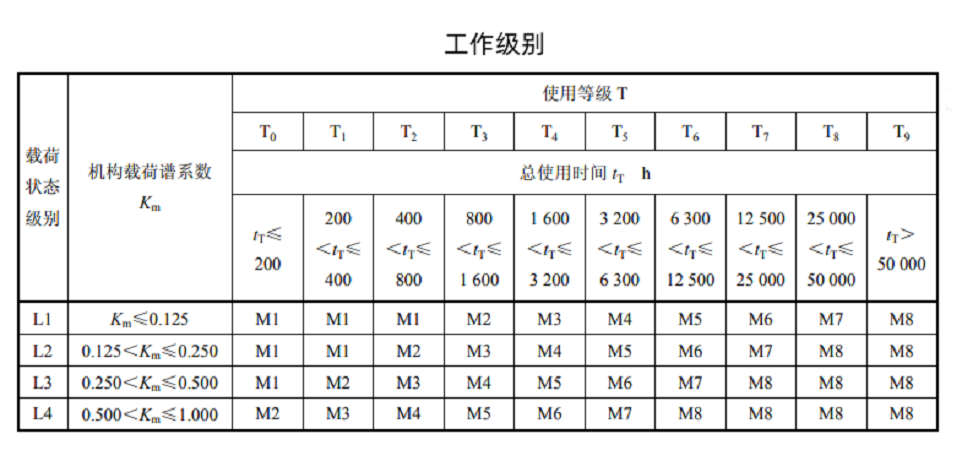
表6 钢丝绳电动葫芦工作级别
2、钢丝绳电动葫芦其它性能参数,见下表7
|
起重量 /t |
0.1,0.125,0.16,0.20,0.25,0.32,0.40,0.50,0.63,0.80,1,1.25,1.60,2,2.50,3.20,4,5,6.30,8,10,12.50,16,20,25,32,40,50,63,80,100,125,160 |
|
|
起重高度 /m |
3.20,4,5,6.30,8,10,12.50,16,20,25,32,40,50,63,80,100,125 |
|
|
起升速度 m/min |
0.25,0.32,0.50,0.80,1,1.25,1.60,2,2.50,3.20,4,5,6.30,8,10,12.50,16,20,25,32,40,50,63 |
|
|
运行速度 m/min |
3.20,4,5,6.30,8,10,12.50,16,20,25,32,40,50,63 |
|
|
慢速推荐为正常工作速度的1/2~1/10; |
||
关键技术
编辑电动葫芦的关键技术是要求保障其可靠性和安全性,这两个重要的要求取决于电动葫芦的设计和生产工艺。
设计
设计包括:承载能力、工作级别、提升高度及安全保障等重要内容。
承载能力
电动葫芦的承载能力是指它所能承受的最大重量,这是电动葫芦技术要求中最基本的要求。承载能力直接决定了电动葫芦所能处理的物品的重量范围。因此,在确定电动葫芦承载能力时,需要考虑使用场景、物品重量、环境条件等因素。
工作级别
工作级别是电动葫芦技术要求中关键的安全要求。它是用来评定电动葫芦所能完成的工作类型,如轻型、标准型、重型、特重型等。这些级别是根据使用场景和所处理物品的重量而定的。确定工作级别后,需要确保电动葫芦的设计和制造符合相关标准,并遵守使用要求,以确保安全。
提升高度
另一个重要的电动葫芦技术要求是提升高度,即电动葫芦所能提升的最大高度。提升高度不仅取决于电动葫芦自身的设计,还受环境和使用条件的限制,如吊装的货物高度、建筑高度等因素。
安全保障
电动葫芦的技术要求中一个关键点是安全保障。为了提高电动葫芦的安全性,相关设计和制造必须遵守相关的标准,如国家标准、行业标准等。同时,在使用过程中,需要员工接受相关培训,确保其正确使用电动葫芦,并遵守安全操作规程。
生产工艺
环链电动葫芦的生产工艺比钢丝绳电动葫芦的要高,主要难点在于链轮的制造工艺上。链轮要做到平稳的传动链条, 首先链轮的几个关键尺寸和链窝形状公差很重要。链轮关键尺寸有节圆直径、 齿顶圆直径、槽底平面到链轮中心的距离、链窝分度误差等,有些关键尺寸的误差要求控制在小于0.1mm 范围内,远远高出国内一些制造厂所理解的范围。加上这些 尺寸的特殊性在于设计上的许多数据要靠具体情况下试验得出,不同制造厂家的链条会有不同的链轮来与之匹配。 所以,这些也是国内许多制造 厂难解决的技术问题。 其次链轮表面硬度也应控制在一定的合理范围内,否则链条链轮啮合、链轮太软会造成链轮过早磨损,影响啮合精度,链条太硬会造成损伤链条。再者链轮的制造误差也是目前国内很难解决的技术问题,必须有一套合理的制造工艺来保证,国内链轮制造方法常用的有铸造链轮和机加工链轮两种。如何控制链轮的制造误差及热处理变形,是制造厂值得探讨的技术问题。
应用领域
编辑钢丝绳电动葫芦具有卷绕性好,噪音小、承载能力大,对于冲击载荷的承受能力较强,品种规格多、应用广泛、运行平稳等特点。可以在同一平面上做直的、弯曲的、循环的架空轨道上使用;也可以在以工字钢为轨道的电动单梁、手动单梁、桥式、悬挂、悬臂、龙门等起重机上使用。
环链电动葫芦具有结构紧凑、体积小、潜在风险小、灵活度高、链条无卷绕性、抗氧化及耐高低温较好、使用寿命相比钢丝绳式葫芦要长等特点,可以应用在特殊环境下,如有腐蚀、高温等环境中。
电动葫芦广泛应用于工业生产中的起重、运输、装卸等环节,如汽车制造、机械制造、钢铁冶炼等领域。2、建筑领域:电动葫芦在建筑领域中也有重要的应用,如高层建筑的施工、桥梁的建设等,能够提高工作效率,保证施工安全。3、物流领域:物流行业中的货物装卸、搬运等环节也需要电动葫芦的帮助,如港口、仓库等场所。综上所述,电动葫芦是一种功能强大、安全可靠的起重设备,具有广泛的应用领域,其技术特点和应用优势受到了越来越多企业和行业的青睐。

电动葫芦在桥式起重机上的应用
发展趋势
编辑中国电动葫芦在体积上越来越向轻量化发展,在外观结构设计方面已朝着方形结构形式、模块化设计发展,增加了零部件的通用性和便于基型的组合、变换,拓宽电动葫芦的使用范围,同时便于安装、运输,降低制造成本的同时还能增加滑轮倍率范围,提高单机使用范围。但对于吊运熔融金属、低温环境、防爆环境、腐蚀性环境等特殊工况下使用的电动葫芦,在设计、研发、生产上还有一定的挑战。关于电动葫芦的标准制定在安全防护装置的设置、起升机构寿命试验要求等局部已达到国际先进水平,与欧盟、美国的技术要求相比,还不够完善和全面,存在一定差距。技术标准要求也逐步与国际接轨。
钢丝绳电动葫芦和环链电动葫芦的对比
编辑钢丝绳电动葫芦
钢丝绳电动葫芦缺点:
1、钢丝绳电动葫芦使用寿命相比环链式要短,钢丝绳是由许多细的钢丝构成,在使用过程中外周与滑轮槽、卷筒壁等表面接触存在磨损,绳直径将变细使承受载荷的钢丝截面积减小,钢丝绳的破断载荷也相应降低;
2、升降位置高度不够X,由于钢丝绳缠绕在卷筒上,吊具升降过程中会随着钢丝绳作卷筒中心轴方 向的位移,造成想要升降的高度和实际高度位置有偏差;
3、抗斜拉能力弱,按照有关技术规范,电动葫芦在使用过程中应该处于垂直或水平状态,避免斜拉重物,但在实际使用中,电动葫芦斜拉重物的情况不可避免,运行小车与承载轨道之间属于硬性连接,在起重物体重量过大时易造成导绳器损坏,若出现钢丝绳互相缠绕即乱绳,设备运行不能及时停止时,钢丝绳可能会被挤进电机与传动装置的缝隙内造成葫芦损毁,因此,生产厂家都会在产品说明书中明确规定钢丝绳对绳槽导入斜角需在3.5度范围内;
4、空载情况下钢丝绳易于出现出槽现象,因钢丝绳本身具有一定的刚性和X,在起升小重量物体或重物降落中刚与支撑物体表面接触的瞬间,会出现微量的回弹,如果物体着地速度较快就容易发生钢丝绳脱离滑轮槽的情况;
5、电动葫芦所规定的升降范围不能调整,钢丝绳无法通过焊接加长且改装后的钢丝绳是不能被再次使用的,如果起重物所要起升高度发生变动时,那么相应的该机型就会被闲置产生浪费。
环链电动葫芦
环链葫芦采用的是链轮和链条铰接配合的方式,链轮上有相应的链轮窝,在同等规格条件下和钢丝绳电动葫芦相比,环链葫芦在起升高度、运行距离、定位精度等方面均有优势 ,同时不会出现乱绳的问题。抗斜拉能力相对较强一些,由于环链葫芦上的吊耳与运行小车的承载轴梁之间有较大空隙,吊耳可绕运行小车的承载轴梁转动,当斜拉重物时葫芦本体将向受力方向摆动,所以环链葫芦的斜拉角度更大一点。只是说明斜拉角度会大一点,要是斜拉重物也是不被允许的。
环链电动葫芦对于链轮和起重环链的设计、生产制造工艺、使用材料等要求比较高,会出现卡链,爬链的现象,运转噪音大,维修保养成本高。
使用规范
编辑安全检查
电动葫芦在使用之前,安全检查是很有必要的,避免一些零部件的异常问题,提前做好危险预防工作。
-
在操作者步行范围和视线范围内、重物通过的路线上应无障碍物和漂浮物,电动葫芦运行轨道上应无异物;
-
手控按钮上、下、左、右方向应动作准确灵敏,电动机和减速器应无异常声响;
-
上下限位器动作应准确灵敏和制动器应灵敏可靠;
-
吊钩在水平和垂直方向及吊钩滑轮应转动灵活,其止动螺母应紧固牢靠;
-
钢丝绳或环链应无明显裂痕,无脱开滑轮槽、乱绳、叠扣、卡链等现象,应X良好;
-
导绳器、吊辅具无异常现象;
-
.电动葫芦的工作环境温度为-25~+40℃;
-
电动葫芦不适用于充满腐蚀性气体或相对湿度大于85%的场所,不能代替防爆葫芦,不宜吊运熔化金属或有毒、易燃和易爆物品。
注意事项
电动葫芦在使用的过程中应注意以下事项:
-
电动葫芦应由专人操纵,操纵者应充分掌握安全操作规程,电动葫芦只允许垂直吊卸重物,不允许倾斜、旁侧吊装及用作拖拉工具等。
-
在使用中禁止超额定负荷和超每小时额定合闸次数(120次)情况下使用。
-
不允许同时按上下按钮或同时按左右按钮。
-
在电动葫芦运行中不得人为地使用限位器来停止重物升降或停止设备运行。
-
起吊运行过程中禁止操作者或其他人员站在电动葫芦和重物下方。
-
电动葫芦不工作时,不允许把重物悬于空中,防止零件产生X变形。
-
在使用过程中,如果发现故障,应立即切断主电源。
-
使用中应特别注意易损件情况。
-
10~20吨葫芦在长时间连续运转后,可能出现自动断电现象,这属于运行电机的过热保护,此时可以下降,过一段时间,待电机冷却下来后即可继续工作。
-
工作完毕后,电动葫芦应停在指定的地方,吊钩距离地面3米以上,手控按钮应放在安全的地方,再关闭电源总开关,切断主电源。
注释
编辑展开[a]
电动葫芦的起升机构布置在运行小车的下面,运行轨道只有一条
[b]
低建筑高度的单轨小车式电动葫芦的起升机构和配重装置分别布置在运行小车的两侧,运行轨道只有一条
[c]
是由国家质量技术监督局发布的关于防爆电器GB3836.1-2000通用标准要求
[d]
是由国家质量技术监督局发布的关于防爆电器GB 12476.1—2000通用标准要求
参考资料
编辑展开[1]谭实. 电动葫芦《中国出口商品交易会会刊》编辑部,《汉英中国出口商品词典》编写组 汉英中国出口商品词典.哈尔滨:黑龙江人民出版社.1990.775.中国工具书网络出版总库. [2023-11-21].
[2]李淦. 电葫芦的构造和使用 北京:机械工业出版社, 1955.10:5.浙江省文献信息资源共建共享网. [2023-11-22].
[3]电动葫芦的技术特点和应用领域.河南省东旭起重机电有限公司. [2023-11-27].
[4]曹善华,顾迪民 . 电动葫芦中国土木建筑百科辞典·工程机械.北京:中国建筑工业出版社.2001:55.中国知网. [2023-11-21].
[5]赵定元, X. 国内环链电动葫芦需要改进的几个技术问题[J]. 起重运输机械, 2014-01-01, (12): 53、56. [2023-11-25].
[6]朱长安, 李瑞雨. 环链电动葫芦与钢丝绳电动葫芦之比较[J]. 起重运输机械, 2013-01-01, (8): 93-94,95. [2023-11-24].
[7]朱立宝. 环链葫芦与钢丝绳电动葫芦的比较[J]. 山东工业技术, 2015-01-01, (17): 252. [2023-11-24].
[8]赵小勇主编;高荣慧,翟华,尤涛,董迎晖副主编. . 电动葫芦设计电动葫芦设计. 合肥:合肥工业大学出版社, 2014.12:3.浙江省文献信息资源共建共享网. [2023-11-22].
[9]苏万斌、朱建新、全维军、柯韬. 电动葫芦质量安全性能分析与研究44.万方数据. 2010-11-22[2023-11-20].
[10]电动葫芦的“前世”与“今生”.搜狐网. [2023-11-27].
[11]必须知道的电动葫芦发展史.起重机械新闻网. [2023-11-27].
[12]机械葫芦原理.机械设备网. [2023-11-21].
[13]电葫芦的组成结构及工作原理.起重商桥. [2023-11-22].
[14]卢万里 . 电动葫芦的使用与维修化学工业出版社;第四章电动葫芦的工作原理.湖北省图书馆(畅想之星电子书). 2021-2:58-86[2023-11-29].
[15]JB/T 9008.1-2014. 钢丝绳电动葫芦 第1部分:型式与基本参数、技术条件[S]. 机械工业出版社, 2014-05-06: 2. [2023-11-24].
[16]宫本智 . 葫芦式起重机葫芦式起重机. 天津:天津科学技术出版社, 2009.08:11.浙江省文献信息资源共建共享网. [2023-11-22].
[17]JBT9008.1-2004钢丝绳电动葫芦2-8.道客巴巴. 2004-10-20[2023-11-24].
[18]JB/T 5317-2016. 环链电动葫芦[S]. 机械工业出版社, 2016-01-15: 2. [2023-11-24].
[19]JB/T 10222-2011. 防爆电动葫芦[S]. 万方数据, 2011-08-15: 4-5. [2023-11-23].
[20]JB/T 5317-2016. 环链电动葫芦[S]. 机械工业出版社, 2016-01-15: 3. [2023-11-24].
[21]JB/T 9008.1-2014. 钢丝绳电动葫芦 第1部分:型式与基本参数、技术条件[S]. 机械工业出版社, 2014-05-06: 5. [2023-11-24].
[22]纽科伦(新乡)起重机有限公司
. 电动葫芦技术要求详解.爱采购. [2023-11-27].
[23]叶振良. 浅析钢丝绳电动葫芦的技术现状及前景《工业设计》 2011年第11期:109-110,共2页.中文期刊服务平台. [2023-11-22].
[24]林夫奎、须雷. 国内外起重葫芦标准化现状及发展趋势分析北京起重运输机械设计研究院有限公司 北京 100007 | 河南省矿山起重机有限公司 新乡:57,59-63.国家科技图书文献中心. [2023-11-28].
[25]电动葫芦安全操作哪些注意事项.电工屋. [2023-11-27].
该页面最新编辑时间为 2024年4月5日
内容由G1343225080提供,本内容不代表全球百科立场,内容投诉举报请联系全球百科客服。如若转载,请注明出处:https://ispeak.vibaike.com/glopedia/1884/