自动驾驶系统简介
编辑自动驾驶系统采用先进的通信、计算机、网络和控制技术,对列车实现实时、连续控制。采用现代通信手段,直接面对列车,可实现车地间的双向数据通信,传输速率快,信息量大,后续追踪列车和控制中心可以及时获知前行列车的确切位置,使得运行管理更加灵活,控制更为有效,更加适应列车自动驾驶的需求。


自动驾驶系统定义
编辑自动驾驶是指车辆能够依据自身设备对周围环境进行感知、理解,根据用户需求自动规划行驶路线,自行进行运动控制,且能达到安全、舒适、高效的乘车体验。自动驾驶是一门交叉学科,包括计算机技术、通信技术、信号处理技术、传 感器技术等。
自动驾驶系统是指列车驾驶员执行的工作完全自动化的、高度集中控制的列车运行系统。自动驾驶系统具备列车自动唤醒启动和休眠、自动出入停车场、自动清洗、自动行驶、自动停车、自动开关车门、故障自动恢复等功能,并具有常规运行、降级运行、运行中断等多种运行模式。实现全自动运营可以节省能源,优化系统能耗和速度的合理匹配。
自动驾驶系统要求建设的城市轨道交通在互联互通、安全、快捷、舒适性方面具有很高的水平。20世纪90年代以来,随着通信、控制和网络技术的发展,可以在地车之间实现大容量、双向的信息传输,为高密度、大运量的地铁系统成为真正意义上的自动驾驶系统提供了可能。
自动驾驶系统功能
编辑自动驾驶系统的主要功能是地车的双向信息传输和运营组织的综合与应急处理。车地信息传输通道是列车运行自动控制系统的重要组成部分,自动控制系统的车载设备完全靠从地面控制中心接受的行车控制命令进行行车,实时监督列车的实际速度和地面允许的速度指令,当列车速度超过地面行车限速,车载设备将实施制动,保证列车的运行安全。
自动驾驶系统实现列车的自动启动及自动运行、车站定点停车、全自动驾驶自动折返、自动出入车辆段等功能,同时对列车上乘客状况、车厢状态、设备状态进行监视和检测,对列车各系统进行自动诊断,将列车设备状况及故障报警信息传送到控制中心,对各种故障和意外情况分门别类,做出处置预案。
通信控制选择
编辑在城市轨道交通领域,分为列车自动控制系统和车辆基地信号控制系统两大部分,其中包括列车自动监控子系统(ATS) 、列车自动防护系统(ATP)、列车自动驾驶子系统 (ATO)、联锁子系统、 维护监测子系统、DCS子系统设备等。各系统设备通过信息交换网络构成闭环系统,列车和地面间采用双向数据通信,列车动态更新位置信息和移动授权信息,计算列车运行的速度曲线并实现列车追踪运行和精确定位停车。主要用于列车进路控制、列车间隔控制、调度指挥、信息管理、设备工况监测及维护管理。
自动驾驶系统关键技术
编辑自动驾驶系统是一个集环境感知、决策控制和动作执行等功能于一体的综合系统,是充分考虑车辆与交通环境协调规划的系统,也是未来智能交通系统的重要组成部分。通常意义上,自动驾驶系统可以分为感知层、决策层、执行层。
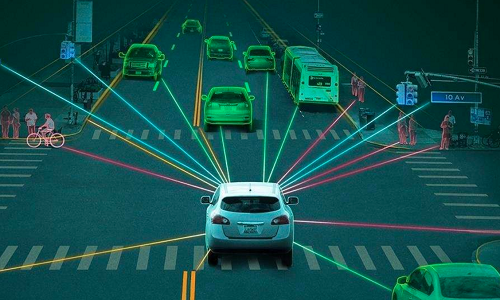
感知层
编辑感知层被定义为环境信息和车内信息的采集与处理,涉及道路边界检测、车辆检测、行人检测等多项技术,可认为是一种先进的传感器技术,所采用的传感器包括激光雷达、摄像头、毫米波雷达、超声波雷达、速度和加速度传感器等。由于单一传感器存在感知的局限性,并不能满足各种工况下的精确感知,自动驾驶汽车要实现在各种环境下平稳运行,需要运用多传感器融合技术,该技术也是感知层的关键技术。
决策层
编辑决策层可以理解为依据感知信息来进行决策判断,确定适当工作模型,制定相应控制策略,替代人类驾驶员做出驾驶决策。这部分的功能类似于给自动驾驶汽车下达相应的任务。例如在车道保持、车道偏离预警、车距保持、障碍物警告等系统中,需要预测本车及相遇的其他车辆、车道、行人等在未来一段时间内的状态。先进的决策理论包括模糊推理、强化学习、神经网络和贝叶斯网络技术等。由于人类驾驶过程中所面临的路况与场景多种多样,且不同人对不同情况所做出的驾驶策略应对也有所不同,因此类人的驾驶决策算法的优化需要非常完善高效的人工智能模型以及大量的有效数据。这些数据需要尽可能地覆盖到各种罕见的路况,而这也是驾驶决策发展的最大瓶颈所在。
执行层
编辑执行层是指系统在做出决策后,按照决策结果对车辆进行控制。车辆的各个操控系统都需要能够通过总线与决策系统相连接,并能够按照决策系统发出的总线指令精确地控制加速程度、制动程度、转向幅度、灯光控制等驾驶动作,以实现车辆的自主驾驶。
发展历程
编辑概念起源
编辑自动驾驶这一概念最早源于1478年达·芬奇(Leonardo Da Vinci)设计的预编程发条马车,1925年8月,美国陆军电子工程师Francis P. Houdina设计了一辆无线遥控汽车。这辆汽车创新性地采用了无线电遥控的方式,实现对汽车操纵机构的远程控制,自动驾驶的概念被第一次带入了现实。1939年,通用汽车公司研发出了世界上第一辆自动驾驶概念车——Futurama,这是一种由无线电控制的电磁场引导的电动汽车。1977年,日本筑波机械工程实验室将通用汽车公司采用的脉冲信号控制方案加以改进升级,创新性地设计了一款能够用来处理道路图像的摄像系统。这辆汽车被认为是现代意义上的第一辆自动驾驶乘用车。1987年,国防科学技术大学研制出中国第一辆自动驾驶的原型车,这辆原型车具备了一定的基本自动驾驶功能。1988年,清华大学开始THMR系列自动驾驶汽车研发工作,其中研发的THMR-V型汽车能够实现结构化环境下的车道线自动跟踪。2004年,美国国防高级研究计划署(DARPA)发起DARPA无人驾驶挑战赛,这也是世界上第一个自动驾驶汽车长距离比赛。该挑战赛一直持续到2007年,共举办了三届,期间涌现出了大批自动驾驶技术相关的人才。
研发热潮
编辑在自动驾驶汽车研究方面,非汽车厂商表现抢眼,以谷歌自动驾驶汽车为例,在2010年10月9日,谷歌公司在官方博客中宣布,正在开发自动驾驶系统,2011年,谷歌成为世界上第一个获得无人驾驶汽车授权的公司。到2012年4月,谷歌已经申请和获得了多项相关专利,其无人驾驶汽车总驾驶里程已经超过了20万公里。2015年10月,特斯拉推出了自动驾驶辅助系统Autopilot。该系统是第一个投入商用的驾驶辅助技术。为进一步实现完全自动驾驶技术突破进行了充分的软硬件准备。2016年,作为汽车技术未来发展的风口,自动驾驶已成为众多企业重点关注的领域。东风、吉利、北汽、上汽等传统汽车制造公司,还有百度、腾讯、阿里巴巴这样的互联网巨头,以及滴滴出行等诸多企业均积极参与自动驾驶技术的研发。2018年,全新一代奥迪A8进行了全球首秀。新款奥迪A8搭载了L3级别的自动驾驶系统。奥迪官方将该自动驾驶系统命名为“奥迪AI交通拥堵驾驶系统”。奥迪官方强调,驾驶员可以双手离开方向盘,真正实现车辆在特定场景下的自动驾驶。2020年9月3日,在中国国际服务贸易交易会上,清华大学展出了6辆无人驾驶汽车。这6辆无人驾驶汽车中,3辆为无人驾驶微循环巴士、3辆为无人驾驶共享轿车,同时应用了无人驾驶往复循环行驶技术,在无方向盘、无油门踏板、无驾驶员的情况下,能够完全实现人工智能驾驶功能,能够满足“点到点”的无人驾驶短途接驳需求。
内容由随风提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://ispeak.vibaike.com/58882